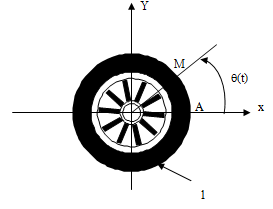
Soit un solide 1 en rotation autour d’un axe z passant par O, la trajectoire des points M du solide est un cercle de centre O et de rayon OM. A t = 0 s, M est en A (position initiale). A t quelconque, M a décrit un arc de cercle.
Abscisse curviligne de M (se dit de la longueur d’un arc de cercle).
La vitesse de rotation ω1/0 (ou θ’1/0) du solide 1 en rotation par rapport au solide de référence 0 est égale à la dérivée par rapport au temps de l’angle de rotation θ1/0 = f (t) .
ω1/0 = θ’1/0 Unité légale le radian par seconde noté rad/s.
θ"1/0 = ω’1/0 Unité légale le radian par seconde carré rad/s²
Remarque : θ"1/0 est aussi égale à la dérivée seconde de l’angle de rotation θ1/0.
L’accélération angulaire décrit ou traduit les variations de la vitesse de rotation ω1/0.
On montre que le vecteur accélération en un point d’un solide en rotation se décompose en deux parties distinctes.
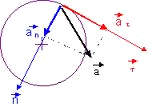
Point d’application : M
Direction : sur le rayon
AnM1/0
Sens : vers le centre du cercle
Module : ω².R = V²/R
Point d’application : M
Direction : sur la tangente
AtM1/0 Sens : celui du mouvement en accélération
inverse au mouvement en décélération
Module : ω’.R
A = At + An = ω².R.n + ω’.R.t
Créé avec HelpNDoc Personal Edition: Produire facilement des livres électroniques Kindle