Caractéristiques Rovio
|
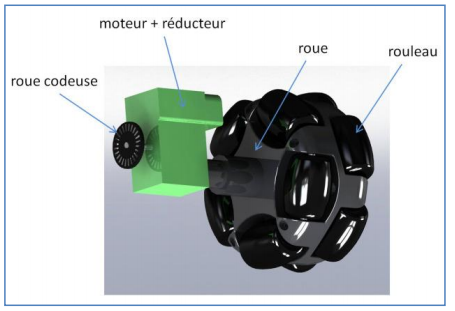
Chacune des 3 roues du robot est mise en mouvement par un ensemble moteur+réducteur. La roue codeuse (capteur angulaire) est liée à une des roues dentées du réducteur. Elle permet à la partie commande de connaître à chaque instant la vitesse angulaire des roues du robot. Caractéristiques du moteur à courant continu Résistance de l'induit : 0.16 Ω Constante de vitesse Ke = 0.00117 V/rad.s-1 Caractéristiques du réducteur I = 0.08 kg.m² Caractéristique des batteries 1 x 6V - 3000 mA.H |
|
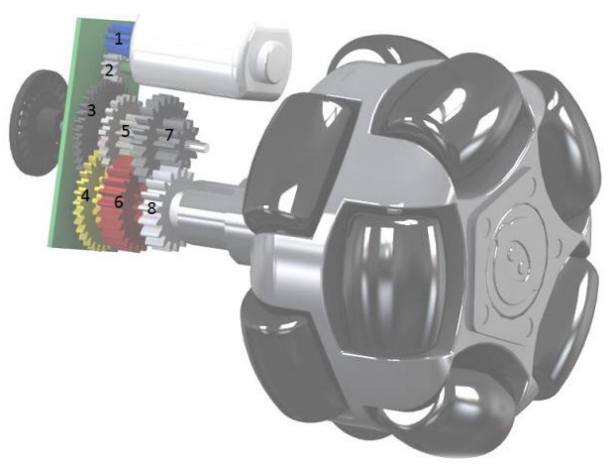
Caractéristiques du réducteur à engrenages
|
Nombre de dents des roues dentées |
Z1 = 9 |
Z2 = 14 |
Z3a = 35 |
Z3b = 11 |
Z4a = 34 |
Z4b = 15 |
|
Z5a = 21 |
Z5b = 10 |
Z6a = 26 |
Z6b = 8 |
Z7a = 17 |
Z7b = 9 |
Z8 = 16 |
Diamètre des roues : 79 mm
Créé avec HelpNDoc Personal Edition: Outil de création d'aide puissant et convivial pour les documents Markdown