Travail demandé
I. Analyse du besoin
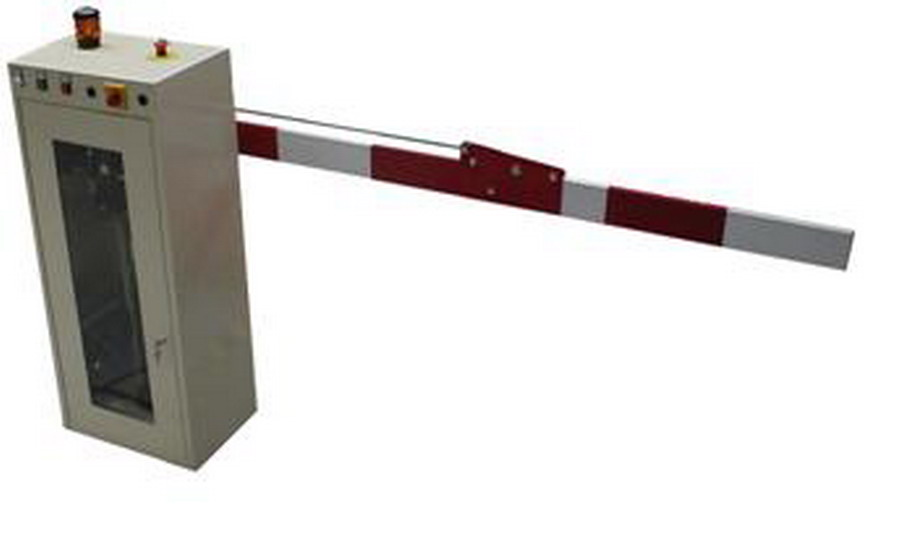
En vous aidant du cahier des charges, exprimer, sur feuille de copie, à quel besoin initial répond le système.
II. Etude du modèle cinématique
- Après avoir lu les animations cinématiques, compléter le schéma cinématique (Ellipse E) sur le document réponse.
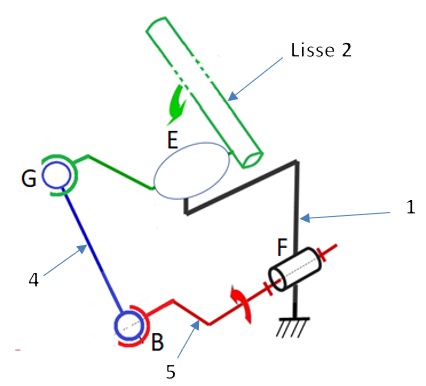
- Déterminer le mouvement de chaque ensemble de pièce (Mvt 2/1, Mvt 3/1, Mvt 5/1, Mvt 6/1) en précisant si ceux-ci sont absolus ou relatifs.
- Déterminer et tracer la trajectoire de chaque point particulier (TD2/1, TA6/1, TI3/1, TB5/1)
- Redessiner le système en position ouverte.
III. Expérimentation
Par le moyen de votre choix, déterminer sur le système le temps d'ouverture de la barrière (L'oeil voit à 24 images par seconde). Etablir un protocole.
IV. Analyse des écarts
Mettre en évidence les écarts entre le modèle réel et le modèle matlab.
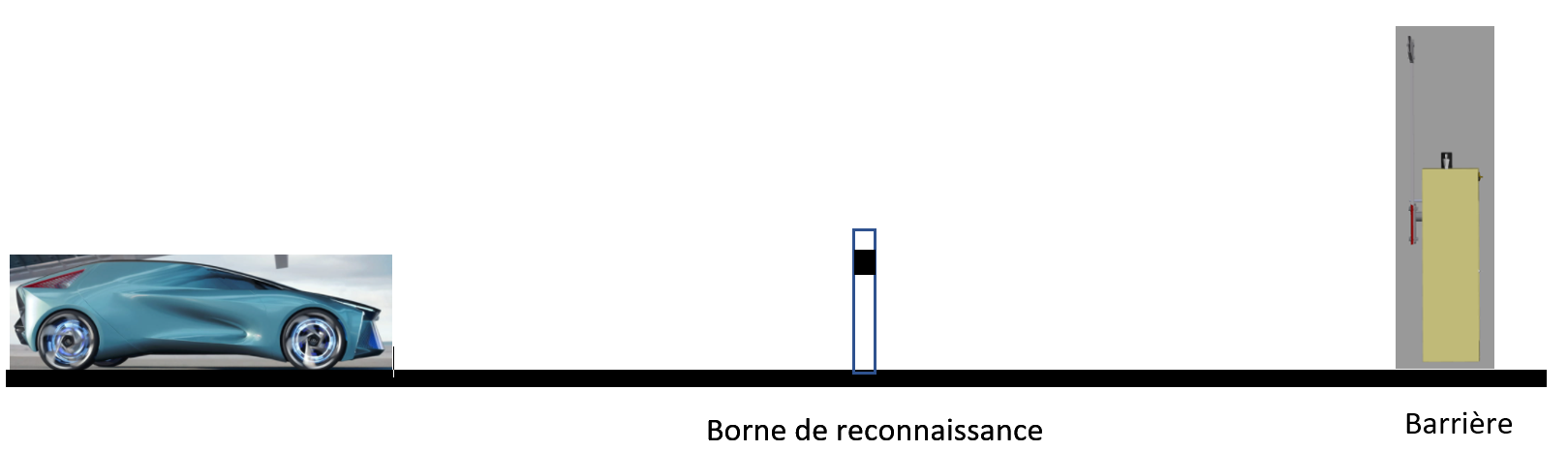
Pour laisser au conducteur le temps de freiner si un problème d'ouverture se pose, la barrière doit être complètement levée alors que le véhicule se trouve à 20 mètres de celle-ci. Il est donc nécessaire d'implanter une borne de reconnaissance du véhicule en amont de la barrière. La vitesse maxi est de 30 km.h-1.
V. Etude du modèle Matlab
- Lancer Matlab 
- Charger le modèle Matlab et le décompresser.
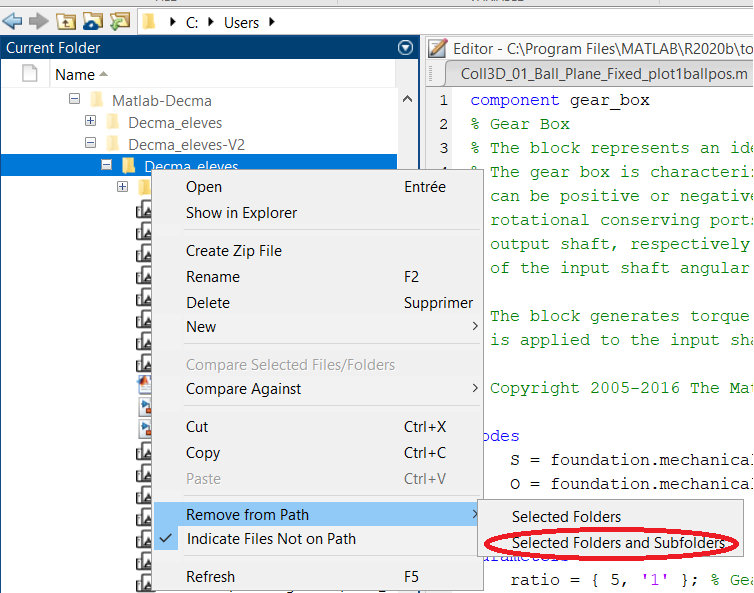
- Dans l'arbre de construction, retrouver le fichier et cliquer comme ci-dessous sur Selected folders and subfolders.
- Lancer le modèle Decma_eleves.slx
- Double-cliquer sur la voiture et remplir le modèle avec les éléments que vous connaissez.
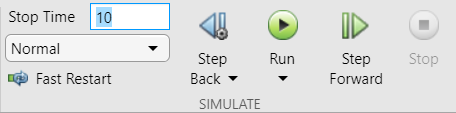
- Lancer le calcul en réglant la durée sur les valeurs trouvées lors de l'expérimentation.
VI. Conclusions
Conclure quand à la position la plus sécurisée à laquelle on devra installer le capteur.
Conclure sur la validité du modèle.
Créé avec HelpNDoc Personal Edition: Générer des livres électroniques EPub facilement