Création du modèle
A l’aide du logiciel Matlab/Simulink, reproduire le schéma ci-dessous :
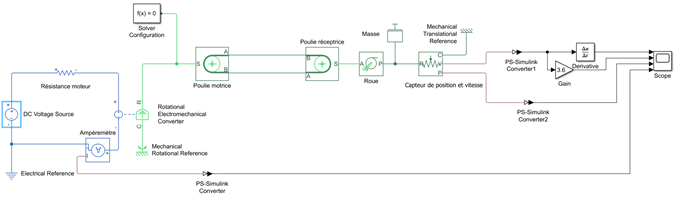
Pour cela :
Insérer depuis la bibliothèque les composants suivants, et configurez-les :
- "Simulink PS converter" : Converti le signal mathématique sans unité en signal physique. Simscape / Utilities /
- "Wheel and Axle » : Roue sur son axe - Rayon : ? (A remplir) Simscape / Foundation Library / Mechanical / Mechanisms /
- "Mass" : Masse du skate : ? (A remplir) - Simscape / Foundation Library / Mechanical / Translational Elements /
- "Ideal Translational Motion Sensor" : Capteur de position et de vitesse en translation. Simscape / Foundation Library / Mechanical / Mechanical Sensors /
- "Mechanical Rotational Reference" : Référence pour la rotation. Simscape / Foundation Library / Mechanical / Rotational Elements /
- "Mechanical translational Reference" : Référence pour la translation. Simscape / Foundation Library / Mechanical / Translational Elements /
- "Scope" : Afficheur de signaux durant la simulation. Simulink / Sinks /
- "Solver Configuration" : Méthodes numériques de résolution des équations de notre système. Simscape / Utilities /
- "Rotational Electromechanical Converter" : moteur à CC avec constante de proportionnalité K = ? (A remplir) -
Simscape / Foundation Library / Electrical / Electrical Elements /
- "Resistor" : Résistance ? (A remplir) -
Simscape / Foundation Library / Electrical / Electrical Elements /
- "Current sensor" : Ampèremètre
Simscape / Foundation Library / Electrical / Electrical Sensors /
- "DC Voltage Source" : Alimentation à courant continu avec une tension constante de 12V.
Simscape / Foundation Library / Electrical / Electrical Sources /
- « Belt Pulley » : Poulie : Simscape / Driveline / Couplings & Drives
Le Scope possède une entrée par défaut, vous avez le choix d’insérer deux scopes, ou de le configurer afin qu’il puisse acquérir quatre signaux en entrée. View - Layout vous donnera le nombre de scopes à afficher et View - Configuration parameters vous donnera le nombre d'entrées.
Relier ces composants entre eux.
Modifier les noms des composants afin de faire apparaitre en français "masse voiture", "capteur de position et vitesse", "afficheur", "Roue", …
Afin de rendre plus "parlante" la vitesse dans les modélisations qui vont suivre, modifier l’unité du capteur de vitesse pour passer des m/s aux km/h. Pour cela multiplier par 3,6 le signal de la vitesse avant l’affichage, en appliquant un gain de 3,6 : ![]() présents dans Simulink/Maths/Operation.
présents dans Simulink/Maths/Operation.
Ne pas oublier ensuite de modifier le texte affiché au-dessus de la courbe de vitesse dans le scope, en modifiant les m/s en km/h.
Affichage de l’accélération
Dans Simscape, il n y a pas de capteur d’accélération préprogrammé. Mais nous savons que l’accélération est la dérivée par rapport au temps de la vitesse. Nous allons donc utiliser la fonction de dérivation ![]() présente dans Simulink / Continuous /.
présente dans Simulink / Continuous /.
Created with the Personal Edition of HelpNDoc: Create iPhone web-based documentation