Introduction
|
|
O6 – Préparer une simulation et exploiter les résultats pour prédire un fonctionnement, valider une performance ou une solution 2.3.6 Représentation plane et spatiale des liaisons élémentaires parfaites. Classes d’équivalences cinématiques, graphe de liaison. Schéma cinématique, schéma cinématique minimal. |

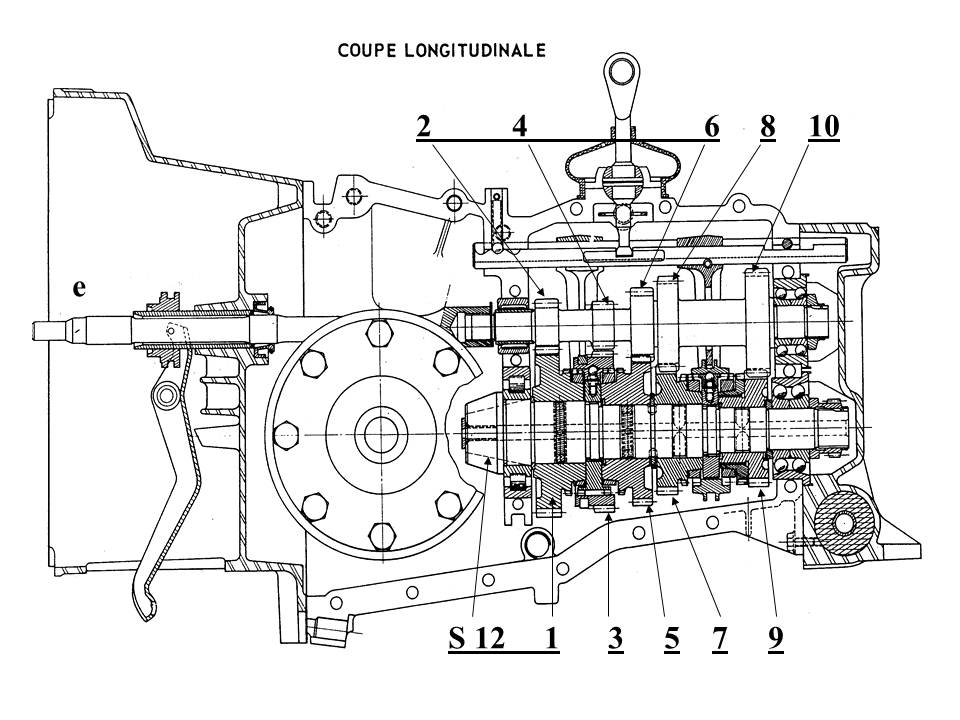
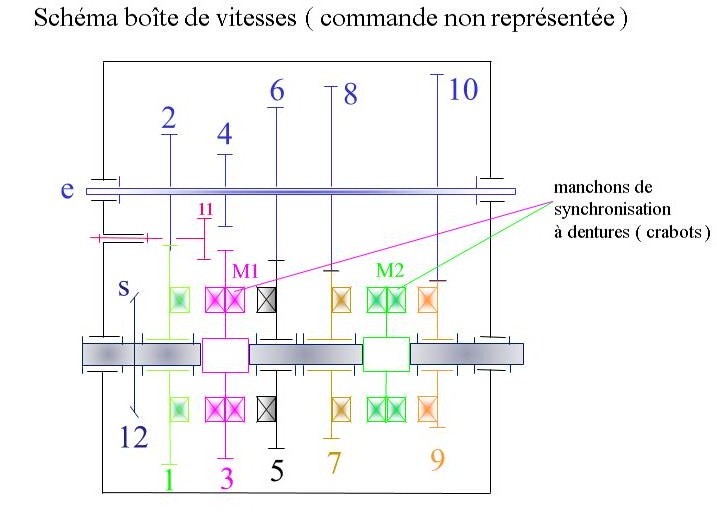
Problématique : On cherche à expliquer et modéliser le fonctionnement des systèmes mécaniques
Created with the Personal Edition of HelpNDoc: Easy to use tool to create HTML Help files and Help web sites